
Simultaneous Safety and Surveying for Collaborative Agricultural Vehicles
Partners
- Michael Nielsen, Danish Technological Institute (Denmark)
- Giulio Reina, University of Salento (Italy)
- Stefan Riling, Fraunhofer Institute for Intelligent Analysis and Information Systems IAIS (Germany)
- Annalisa Milella, Institute of Intelligent Systems for Automation (Italy)
- Peter Fröhlich, AgriCircle AG (Switzerland)
Outline
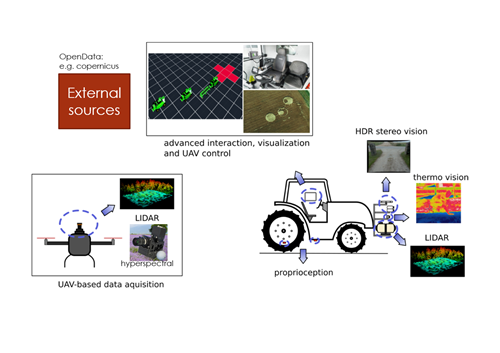
- Previously, we looked at Stereo vision, radar, lidar, and thermography for safety
- Why not collect all this data in a unified system, like a FMIS, and use it for future reference to enhance perception and enable collaborating ground and air vehicles
- Geofencing static objects, avoiding dynamic objects
- Detecting topological changes
- Adapting sensors to be used for crop status as well
- Including 3D information to all sensor data for e.g. spatial understanding symptoms, implement control
- Proprioception to increase 3D accuracy of measurements, and map the trafficability for controlled traffic farming
- Minimizing adoption challenges by providing unified system for acquisition, management , decision support and usability, dealing with complex data
- For precision farming, the maps can be used in sensor-driven actuation loops of different sizes:
- Open loop. The constantly-updated map and semantic overlay(s) requested can just sit in the display for the farmer to use as he wishes. He can manually or automatically cycle through available displays to keep him informed.
- Farmer’s helper. As above but with points of interest discovered by the local sensors added as a highlighted layer as they occur e.g. large boulders, non-standard crop appearance, warm spots. The farmer can touch one of the highlighted areas and get more information.
- UAV control. The touch screen on the display can be used to send a drone to a specific point, collecting more local data from an area of interest without the ground vehicle being needed.
- Applicator control. The local data can be used to calculate the amount of e.g. fertiliser or pesticide that is needed over the next timeframe, the target application location in 3D, and to directly instruct and adjust the application device. AC’s FMIS already produces action maps that directly control a wide range of automated vehicles and implements, whether they use ISOXML (ISOBUS) or proprietary data formats.
- Safety. Emergency override when potentially dangerous situations are detected. If local thermography detects a warm body in the path of the ground vehicle, then the vehicle can be stopped autonomously; or if the wheels slip too much, the vehicle can be turned to face the slope. Our system will also be able to provide an accurate grid reference for emergency services in event of e.g. ground vehicle rollover, along with a map of the tracks providing access.